A Novel Perceptive Robotic Cane with Haptic Navigation for Enabling Vision-Independent Participation in the Social Dynamics of Seat Choice
Shivendra Agrawal, Mary Etta West, and Bradley Hayes
Abstract
Goal-based navigation in public places is critical for independent mobility and for breaking barriers that exist for blind or visually impaired (BVI) people in a sight-centric society. Through this work we present a proof-of-concept system that autonomously leverages goal-based navigation assistance and perception to identify socially preferred seats and safely guide its user towards them in unknown indoor environments.
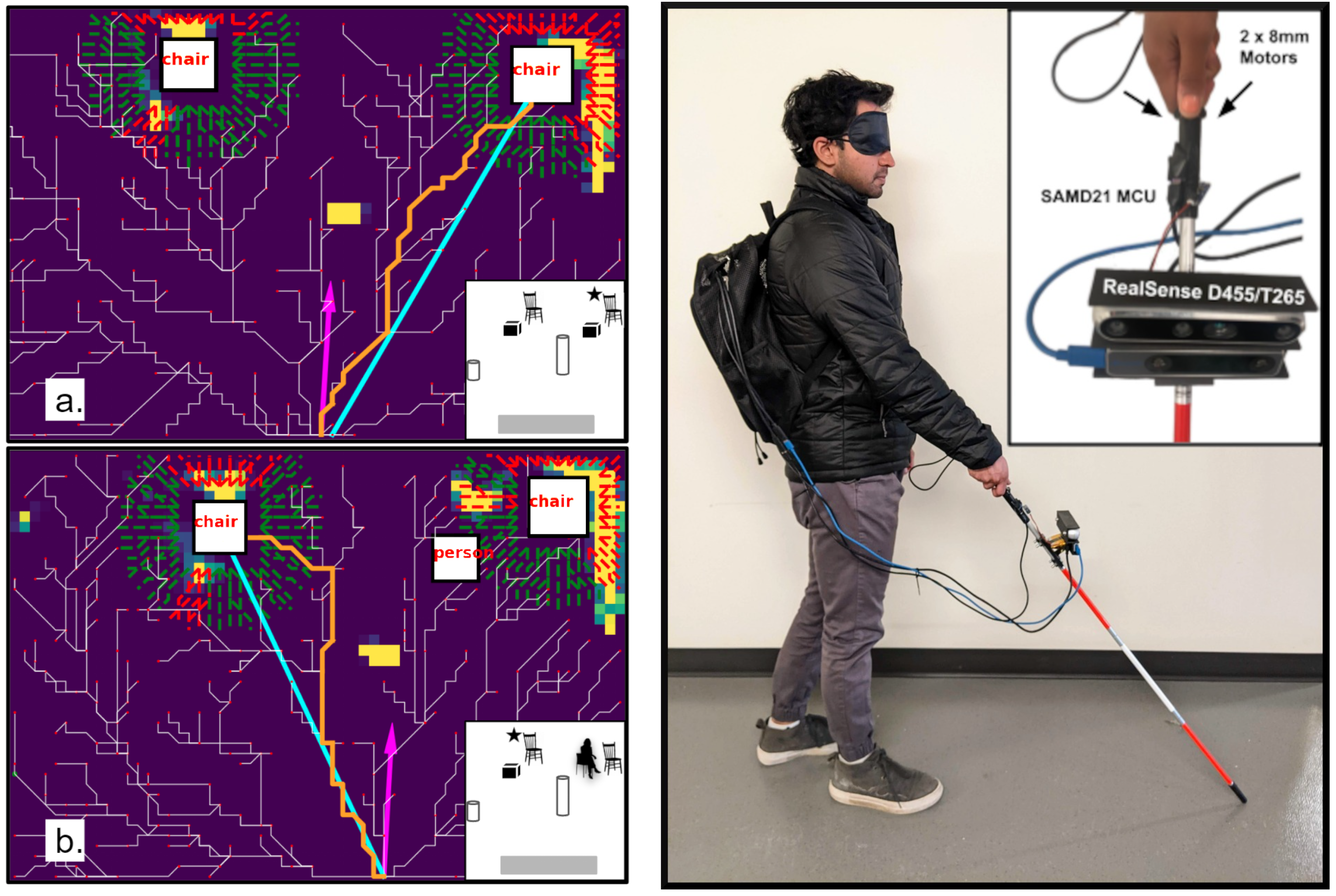
The robotic system includes a camera, an IMU, vibrational motors, and a white cane, powered via a backpack-mounted laptop. The system combines techniques from computer vision, robotics, and motion planning with insights from psychology literature to perform 1) SLAM and object localization, 2) goal disambiguation and scoring, and 3) path planning and guidance. We introduce a novel 2-motor haptic feedback system on the cane’s grip for navigation assistance.
Through a pilot user study, we show that the system is successful in classifying and providing haptic navigation guidance to socially preferred seats, while optimizing for users’ convenience, privacy, and intimacy in addition to increasing their confidence in independent navigation. The implications are encouraging as this technology, with careful design guided by the BVI community, can be adopted and further developed to be used with medical devices enabling the BVI population to better independently engage in socially dynamic situations like seat choice.
The full paper can be accessed here, from our Publications tab, and in the IROS 2022 conference proceedings.